Movies like i-Robot, Terminator and the like have made an impression on the general public that a Robot is a humanoid form of “Artificial Intelligence” which can play football and have facial expressions, etc. This is all about good research and technology development but NOT specific to commercialization and deployment. The best analogy is research and technology developed for an F1 car. Not everything that works for an F1 car is commercially deployed. Only certain IMPACTFUL technology like spoilers, turbo charging, lubrication, braking technology, streamline shapes, tyre treads, safety features, materials & surface treatment, etc. are commercially deployed in automotive manufacturing by the car manufacturers.
Companies like Boston Dynamics had made significant strides in bipedal (human forms) and quadrupedal (animal form) robots performing obstacles and dances. SPOT is a commercially viable robot which has been made to look a bit redundant with XioMi unveiling (but not deploying) the CyberDog, a cheaper version of the quadrupedal robot.

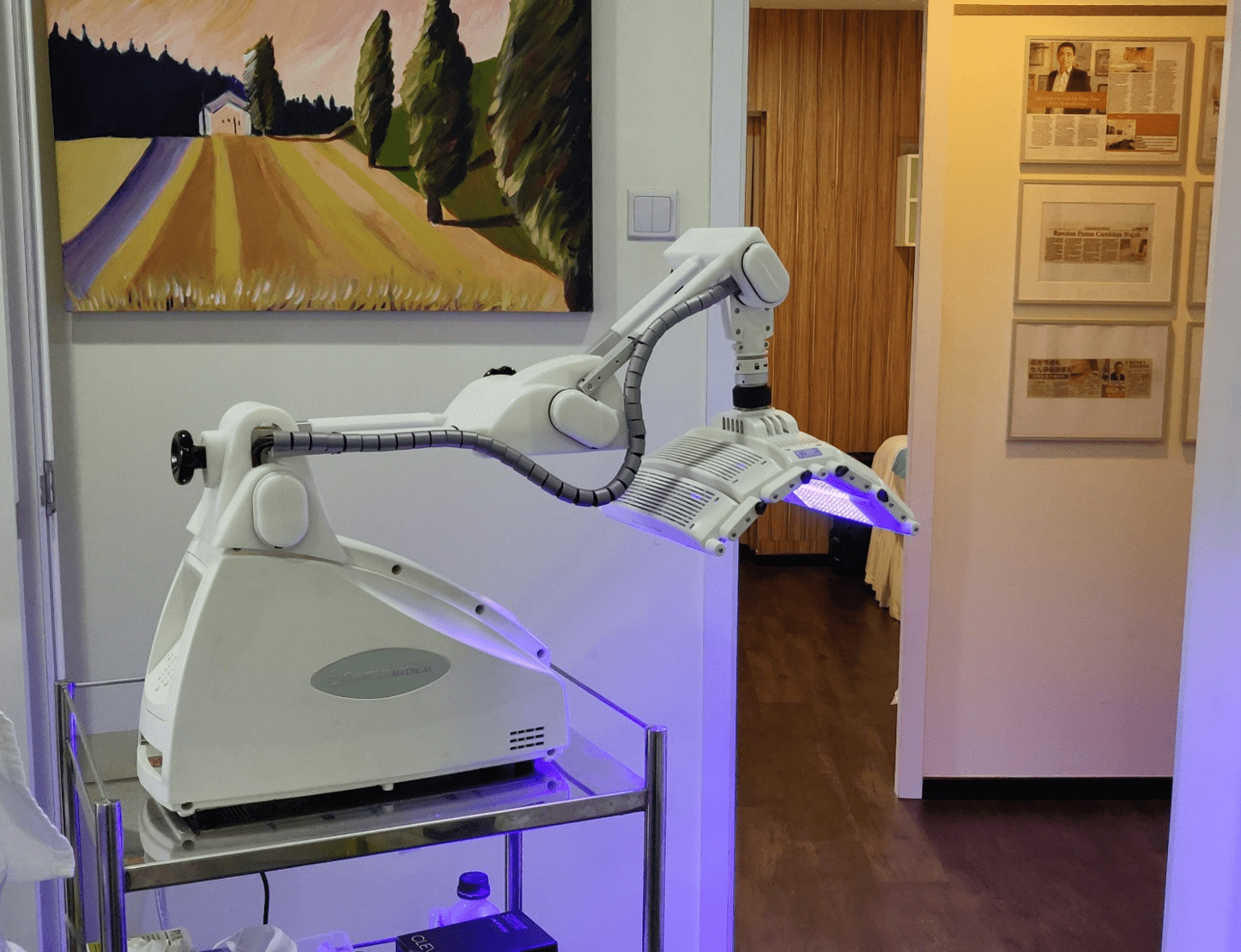
Recent robotic applications like the Tray Return Robot, Serving Robots, Coffee Barista Robots, Security Bots and Cleaning Robots are examples of applications that demonstrate a “Lack of Natural Intelligence” (aka stupidity).
Application of Automation and Robots is colossal waste of resources if not used with the right intent. Real applications of Robotics are simple, efficient and cost-effective and it is definitely NOT a solution for labour shortages.
Automation should be used in specific processes to get the biggest bang for the buck, namely:
- High Precision Processes
- Repetitive Processes
- Hazardous Processes
In Automated processes, usage of servo motors (which provide a feed-back signal) is necessary for process control. Servo motors are typical used as linear and rotary actuators. Combining multiple servo motors provides motion in multiple degrees of freedom.
Such systems are available off-the-shelf and can be easily integrated into automated systems. It gives engineers more options to design for the desired applications.
When designing an automated system, it is important to identify the purpose of the application and NOT use “what looks cool!”.
Remember, the simplest design is the best design.
Sales and Marketing folks are typically interested in the Optics, not the application. However, the design MUST be driven from an Application point of view and NOT Optics. If engineers succumb to the Optics, it not only increases the cost and complexity for development, but also impacts in the reliability and efficiency of the system. This will inevitably incur significant losses and the project will be written off as a failed investment.
Now, when conceptualizing the design, engineers should consider 3 types of Robotic solutions:
- Cartesian Robots ( aka Gantry Robots)
- SCARA Robots
- 6 axis Robots (including Cobots)
The 1st option should always be to check if a Cartesian Robot (XYZ servo slides, gantry systems) can perform the desired application. If yes, then this is without doubt the cheapest and simplest option with a high reliability and success rate.
Cartesian Robots are effective because the motion profiles can be easily defined and prevent crashes / interference. It is a space saving and safe design, not to mention cost-effective.

The 2nd Option is a SCARA (Selective Compliance Articulated Robot Arm) Robot. This is good for small space saving applications, especially the ability to INSERT with precision. The motion profile mimics the motion of the human hand with two articulated joints (shoulder and elbow) and the rotation and insertion ability of the wrist.
SCARA Robots are heavily used in Hard Disk Drive and Semi-Conductor Manufacturing where loading, unloading, insertions, pick & place processes are required for high volume manufacturing.
The 3rd Option is a 6-axis Robot. These are expensive, heavy duty and typical applications include painting, welding and other complex (BUT repetitive) movements which need the degrees of freedom to access certain hard-to-reach areas.

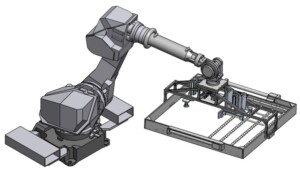
The calibration, setup and programming of the motion profiles is a complex task and MUST be used either via remote control if the process unique (like Explosive Ordnance Disposal) or via software for repetitive movements like welding and painting.
Typically, when deploying 6-axis robots, safety and fencing are major concerns. To alleviate this, Cobots (Collaborative robots) were developed to work along side human operators. Cobots are just that; they “collaborate” or “assist” human operators with dangerous, strenuous, or tedious tasks. They are easier to program but this also limits their performance and ability in the high-volume manufacturing. If a fully automated process is required, an industrial 6-axis robots is the right approach.
So, in conclusion,
Design for the application; not the optics
Design for simplicity and high reliability
Design with Natural Intelligence




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}